Aktuelle Situation – Antriebstechnik
Gekennzeichnet durch den fast ausschließlichen Einsatz von Verbrennungsmotoren (meist Diesel), damit verbunden:
- Bedingt durch Großserienfertigung relativ niedriger Preis
- Ausgereifte Technik, Zuverlässigkeit trotz hoher Komplexität und vieler Nebenaggregate befriedigend
- Verwendung mit Motoren mit relativ großer Leistung und damit großem Gewicht, Verbrauch und Kosten, um den ungünstigen Drehmomentverlauf vom Verbrennungsmotoren zu kompensieren
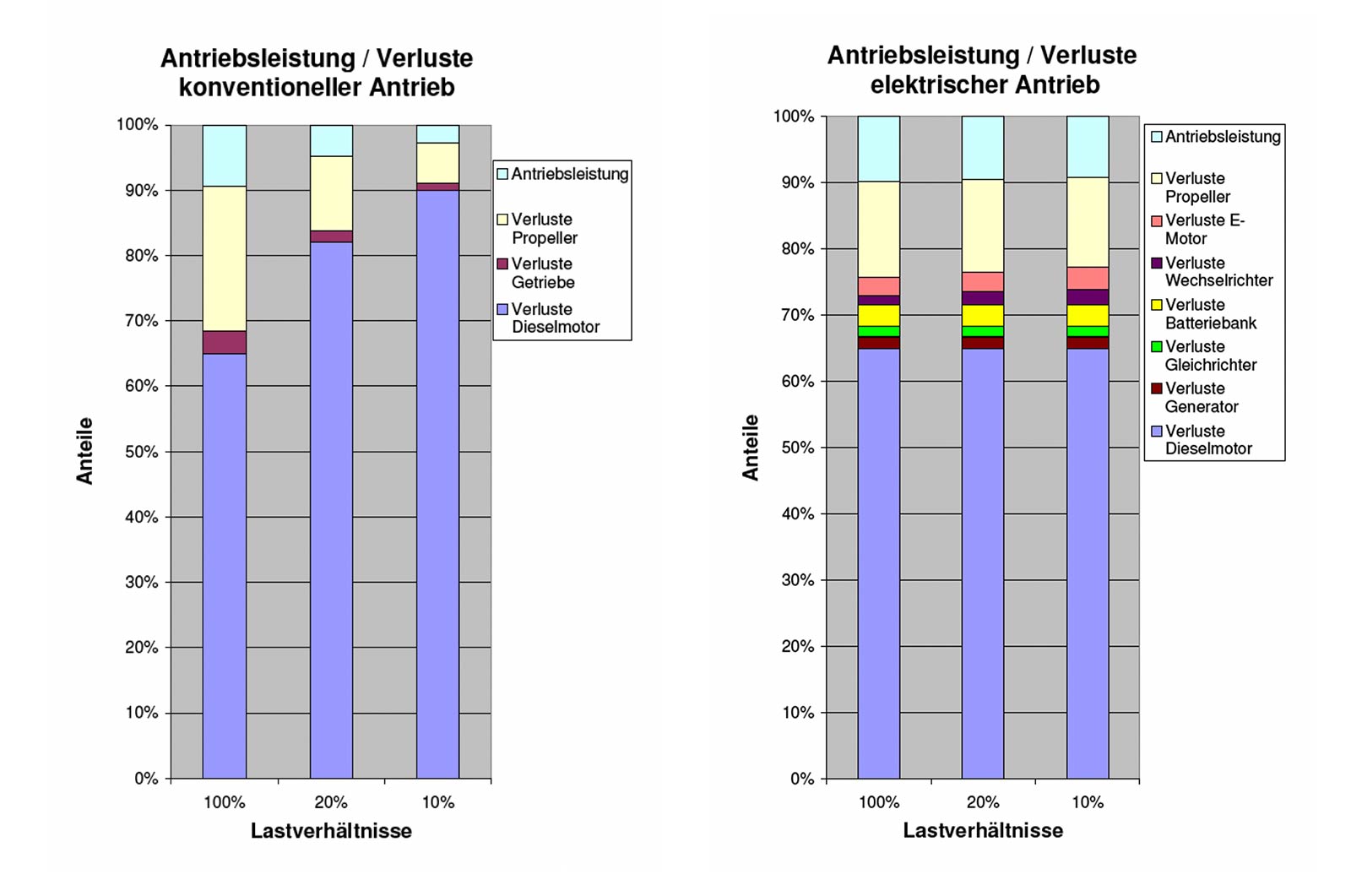
- Schlechter Propeller-Wirkungsgrad bedingt durch Auslegung auf Drehmomentverlauf des Verbrennungsmotors
- Häufiger Betrieb des Motors im Teillastbereich, damit schlechter Motorwirkungsgrad, höherer Verschleiß und Verbrauch, schlechte Abgaswerte u.a. auch beim Aufladen der Bordbatterien über die Lichtmaschine
- Ungünstiges Manövrierverhalten durch träges Drehzahlregelverhalten und langsame Drehrichtungsänderung (mechanische Umschaltung über Getriebe)
- Relativ hoher Wartungsaufwand für den Motor (Service, Ölwechsel,..)